Во время симуляции миссии на Марс астронавт МКС Маркус Вандт успешно управлял роботом по имени Берт, который остался на Земле. Этот эксперимент направлен на демонстрацию прогресса в развитии космической робототехники и её потенциала для исследования других планет.
Берт — это четырёхногий робот, который отличается от своих предшественников возможностью передвигаться не на колёсах, а на ногах. Такая система позволяет роботу изучать грубую местность, подниматься на холмы и проникать в пещеры — задачи, которые ранее были трудноразрешимы для роботов, оборудованных колёсами. Это делает Берта особо полезным инструментом для будущих космических миссий, включая исследование поверхности Марса.
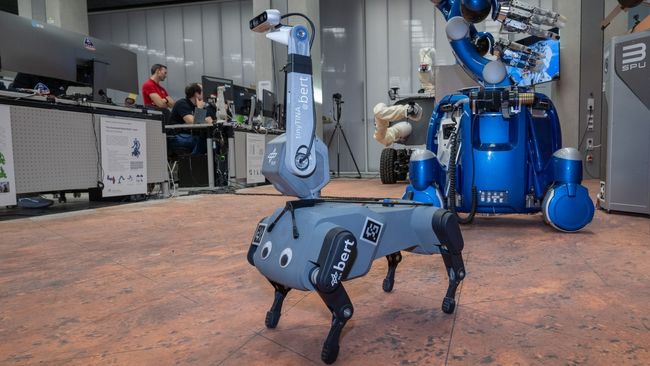
Источник: DLR (CC BY-NC-ND 3.0)
Эксперимент проведён в рамках проекта Surface Avatar, совместно между Немецким космическим агентством (DLR) и Европейским космическим агентством (ESA). В эксперименте, помимо Берта, принимали участие гуманоидный робот Rollin’ Justin, передвигающийся на колёсах, и марсоход ESA Interact Rover. Коллектив успешно провёл установку короткой трубы, которая послужить имитацией научного измерительного прибора в марсианской миссии.
Управление роботами во время космических миссий сталкивается с вызовами, связанными с задержкой в передаче сигнала между Землёй и другими планетами, так как это требует новых методов работы и передачи информации. Кроме того, астронавты на МКС также испытывают задержку в несколько секунд между своими действиями на орбите и действиями роботов на поверхности планеты.
«До сих пор астронавты дистанционно управляли из космоса только роботами, оснащёнными колёсами. Но Берт освоил несколько типов походки и, благодаря передвижению на ногах, может помогать исследовать даже пересечённую местность, включая небольшие пещеры, до которых не могут добраться его товарищи по команде, обладающие колёсами»,— пишут представители DLR.

DLR продолжает годами проводить учения и эксперименты с астронавтами на МКС. Этот последний эксперимент продолжает исследование «задержек времени, влияющих на управление роботами во время космических миссий», проведённым в июле 2023 года.
ЕКА активно работает в рамках программы Artemis, целью которой является отправка астронавтов на поверхность Луны в ближайшие годы. В рамках этой программы также планируется установить базу на Луне и обеспечить постоянное присутствие на южном полюсе Луны, где находятся потенциальные ресурсы, полезные для космических миссий.
Роботы DLR, предназначенные для использования на Луне, могут стать основой для будущих миссий на Марс, с предварительной проверкой их технологической надёжности и безопасности.